一、PID 原理
偏差控制,利用目标值(期望值)与实际测量值构成的偏差(误差)对被控对象进行线性的控制。偏差 = 目标值 - 测量值。
二、四旋翼串级双闭环 PID 控制
对于四旋翼,可以理解外环为角度环,内环是角速度环。
1. 外环
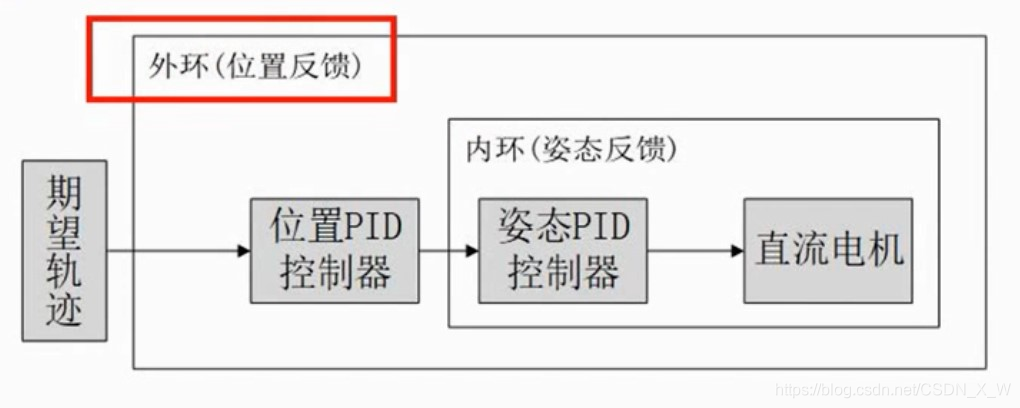
- 目标值:期望轨迹,即期望的姿态角度。
- 测量值:实际的姿态角度。
- PID控制器的输入:目标值 - 测量值。
- PID控制器的输出:提供使测量值趋近于目标值的方法
注:
①. 外环是位置反馈 -> 反馈了当前的位置,即当前偏航了多少角度。
②. 外环控制是为了达到期望的角度,因为角度是由角速度积分得到,dT时间,外环输出的控制量反应角度的偏差值,dT时间的角度偏差即角速度,所以把外环PID的输出作为角速度来用,外环的输出就是我们想要达到的角速度。把外环的输出作为内环的输入(内环的目标值),即我们期望角速度进行怎么样的变化,才能使姿态角度达到我们期望的姿态角度。2.内环
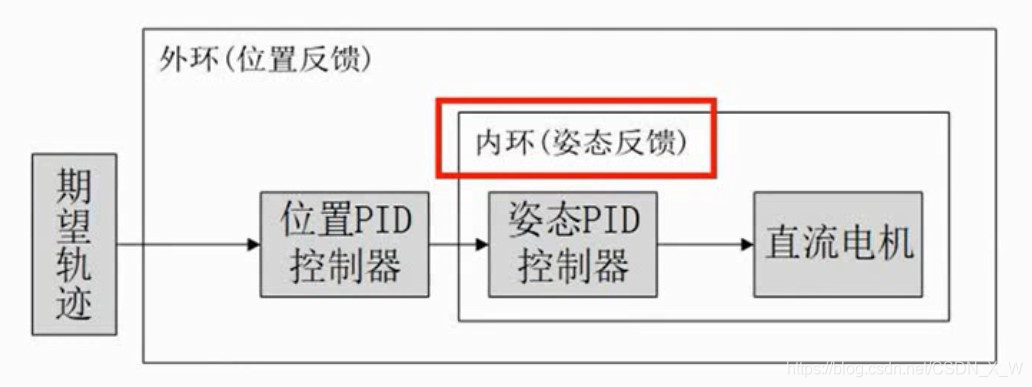
- 目标值:外环的输出,即期望的角速度。
- 测量值:实际的角速度。
- PID 输入:目标值减去测量值。
- PID 输出:提供使测量值趋近目标值的方法。
注:
①. 内环的目的是要达到期望的角速度,角速度直接与电机的转速有关系。所以内环 PID 的输出,作为实际调节电机转速的参数去使用。
②. 在纯姿态模式下,四旋翼电机的转速由两部分组成,遥控油门提供的是基础转速,PID的输出作为维持姿态平稳的调节转速。这就是纯姿态模式下飞机的高度不好控制的原因,要使飞机维持在一个高度,就需要基础转速所提供的升力刚好与重力相等。飞行过程中维持飞机平稳的是调节转速,它保证了飞机平衡的姿态。
...
...
00:00
00:00
本文为作者原创文章,未经作者允许不得转载。